华为avatr阿维塔11激光雷达详细拆解和系统方案
2024-05-21 20:11:43
华为作为中国自动驾驶技术第一梯队的卓越代表,其激光雷达产品也备受瞩目,不过关于华为激光雷达的公开资料非常少,即便是有也非常粗略。
【一】华为激光雷达的市占率
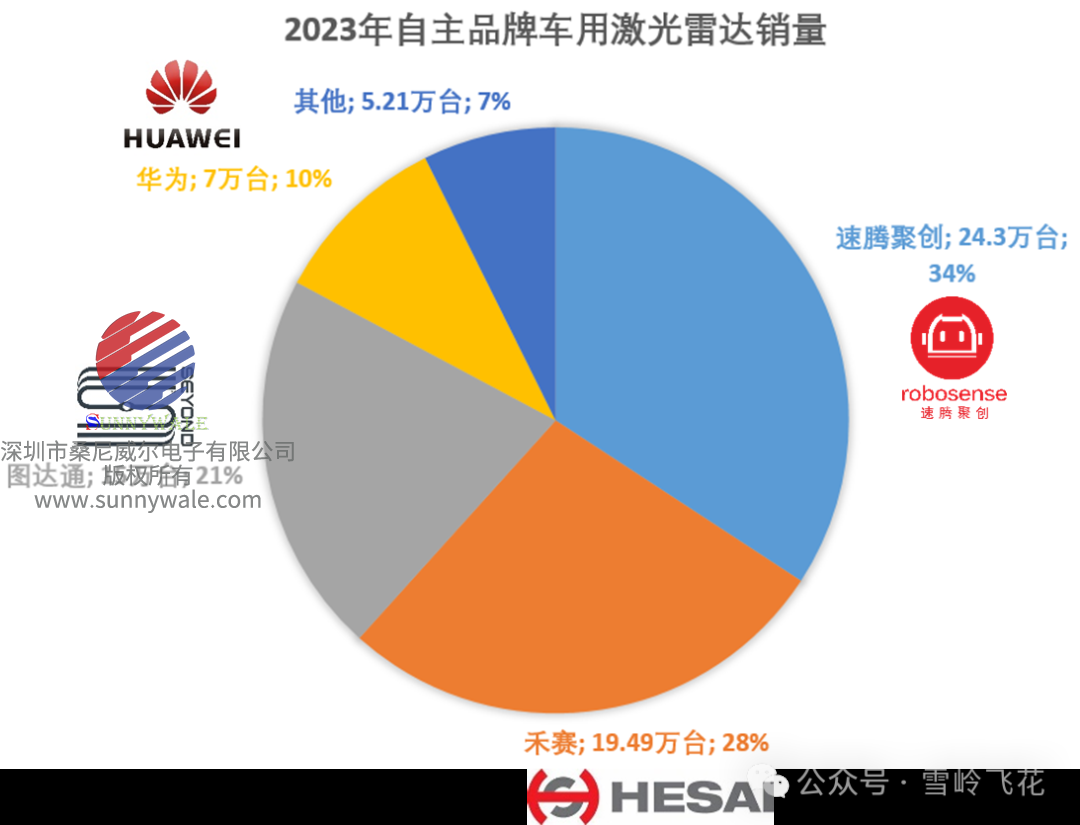
2023年,中国车用激光雷达(自主品牌)总出货量约71万台,其中,速腾聚创是24.3万台(2022年是3.69万台)位列第一,禾赛是19.49万台(2022年是6.2万台),图达通大概超15万台,华为预计7万台,另外探维科技、览沃科技等其他大概合计5.21万台。
销量占比如下图所示:
图2(2023年自主品牌车用激光雷达销量)
中国是车载激光雷达的主要市场,2023年由于自动驾驶量产车型的增多,激光雷达出货量取得了大幅的增加。
2024年依然会保持增长势头,其中,速腾聚创财报显示,截止到2023年底,速腾聚创已经与22家车企及Tier 1取得定点合作,车型涉及63款。其中有12家车企的24款车型SOP,速腾将2024年的出货量目标定在了100万台。
禾赛科技预计在2024年底实现12家车企的40种车型达成SOP,2024年出货量预计大幅增长至60-70万台。
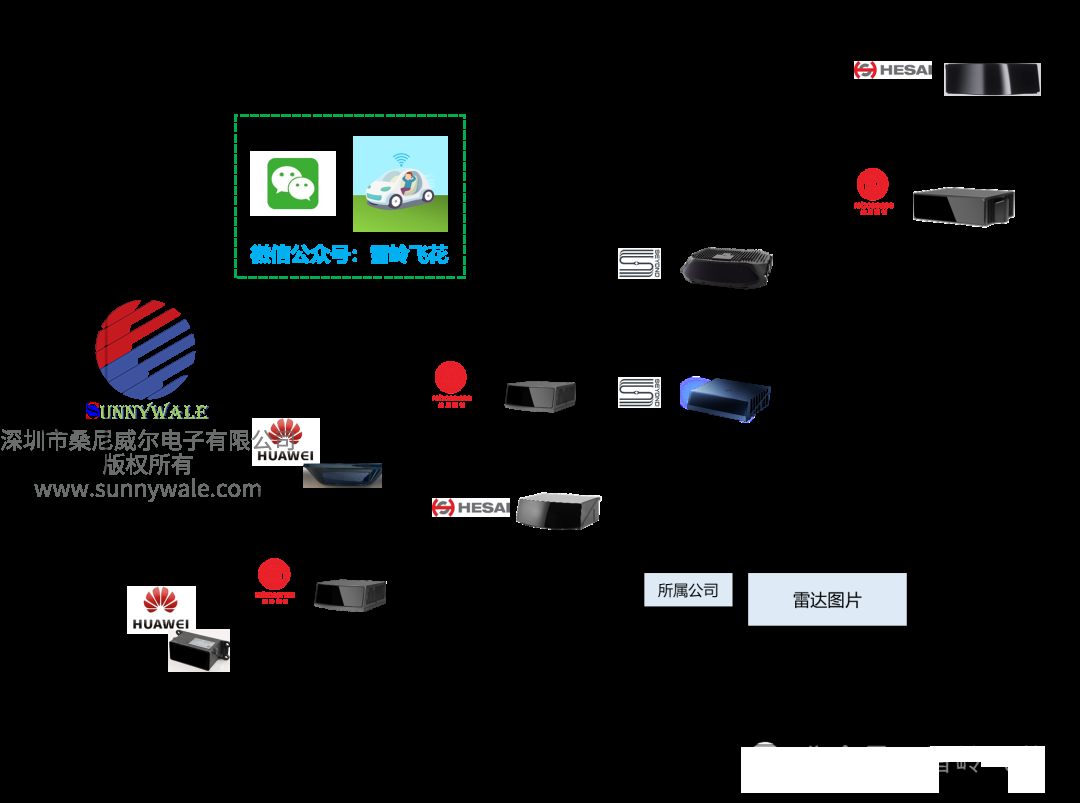
华为目前的主要客户是问界、阿维塔、极狐、智界、哪吒等,对应车型相关信息如下所示。随着问界等车型的热卖,2024年华为激光雷达的出货量会有大幅提升。
图3(华为汽车各品牌所用激光雷达)
【二】华为激光雷达和其他产品的性能对比
下图汇总了目前主流的激光雷达产品主要性能指标,对比如下所示。
图4(目前主流的激光雷达产品主要性能指标)
说明:上图数据来源于各公司官网和行业信息,将各产品依据标称的测距和角分辨率在坐标系中进行大致摆放,主要目的在于从特定的角度对部分性能进行对比,这些指标并无法代表激光雷达的全部性能,仅做参考。
从这张图可以看出很多信息,其中:
华为96线激光雷达(型号:D2)距离发布有3年半的时间,从测距和分辨率指标来看,在当前主流产品中已不占优势。
华为192线激光雷达(型号:D3)相对于速腾M1P和禾赛AT128,测距和角分辨率指标相当或者略高,和其他更高性能产品相比,尚有差距。
【三】华为96线激光雷达拆解
2020年12月,华为正式发布其首款车规级激光雷达产品 ——96线中长距
激光雷达L107。
核心参数:
● 测距:150m@10%;
● 水平FOV:120°,垂直FOV:25°;
● 角分辨率:0.25°(H)×0.26°(V)
● 刷新频率:最高25Hz
图5(96线中长距激光雷达)
下图阿维塔11上安装了3颗华为96线激光雷达,其中1颗前向,2颗在侧面。
图6(阿维塔11上安装了3颗华为96线激光雷达)
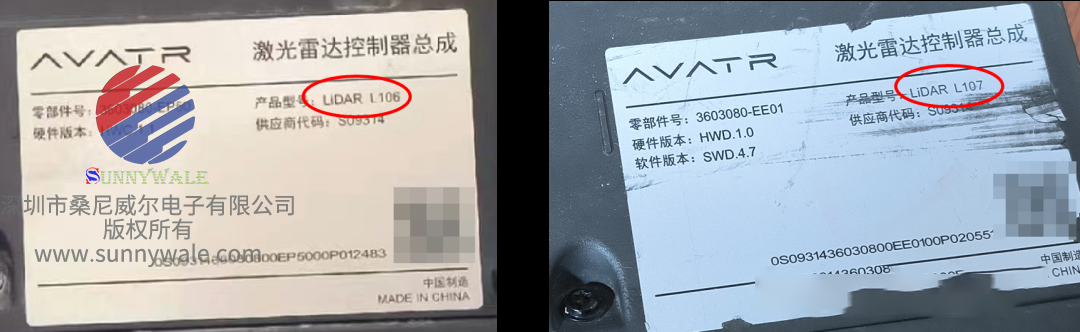
阿维塔的激光雷达有L106和L107两种型号,应该1个是前雷达,1个是侧雷达。这两种型号外形相同,不同点可能是不同安装位置做了微小适配,内部原理应该相同。
图7(阿维塔激光雷达有L106和L107的标签)
【1】整体结构
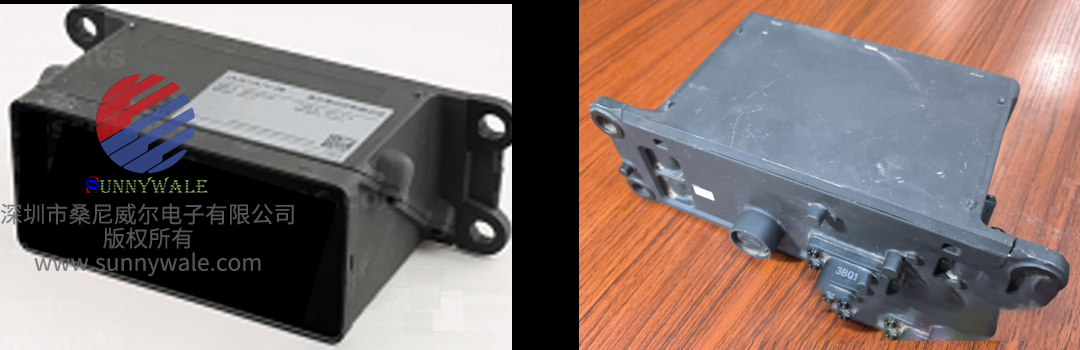
这款雷达采用较为规整的长方体外形,视窗口是一个矩形平面,和车身配合较为方便。整体外观如下:
图8(阿维塔11激光雷达控制器总成外壳)
阿维塔11激光雷达控制器总成L107尺寸如下,相对于速腾M1P和禾赛AT128,这个雷达的尺寸是比较大的。
图9(阿维塔11激光雷达控制器总成外壳尺寸)
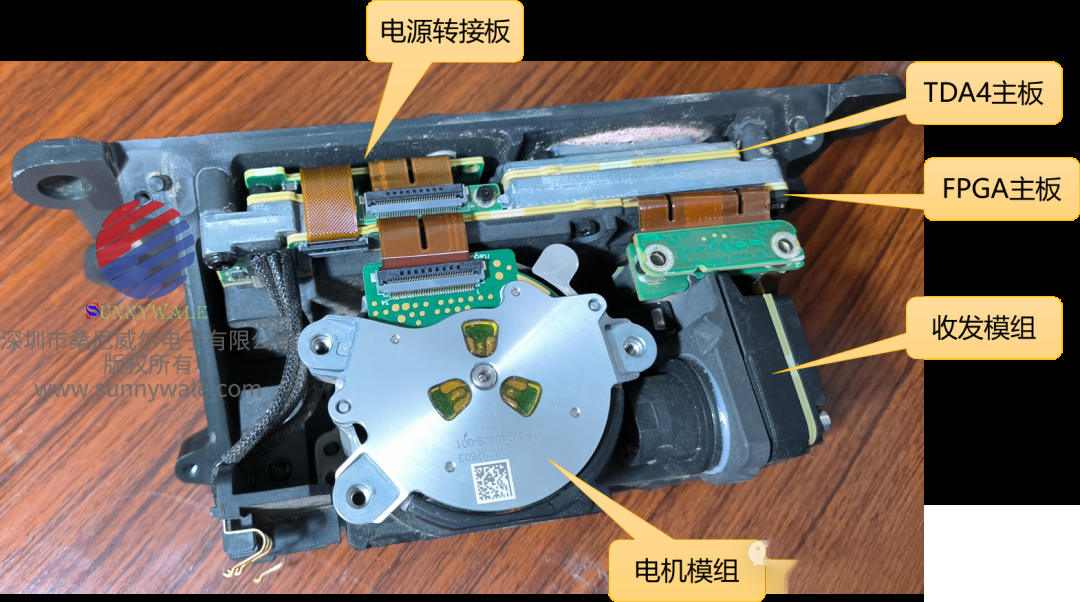
阿维塔11激光雷达控制器总成L107,拿掉上壳之后的内部结构图:
图10(阿维塔11激光雷达控制器总成L107内部结构图)
阿维塔11激光雷达控制器总成L107将底壳也去掉之后,核心电路板的连接关系图:
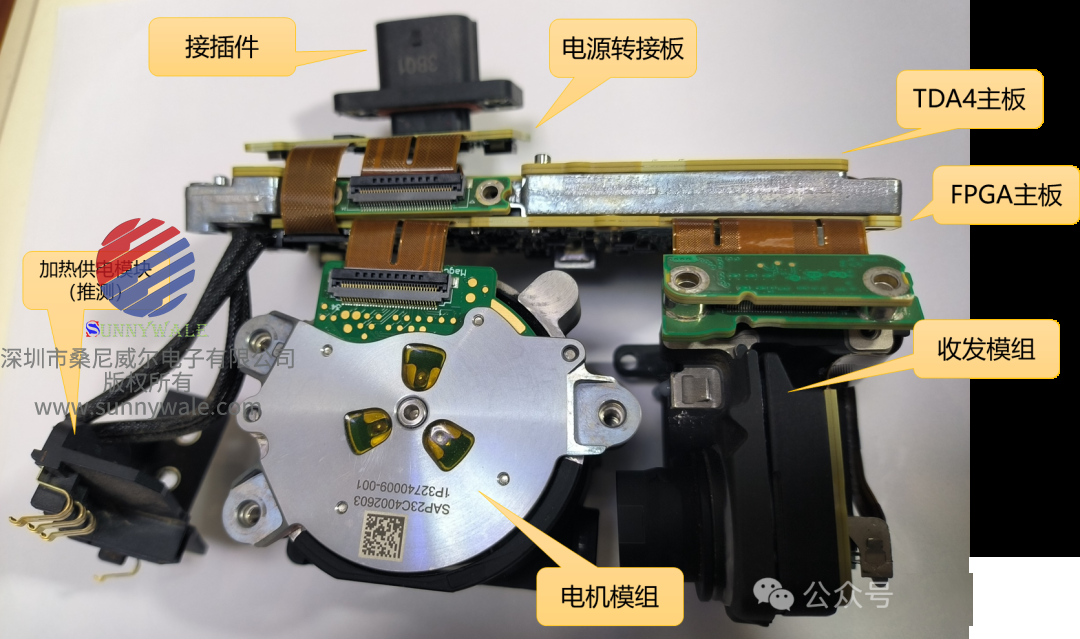
图11(阿维塔11激光雷达控制器总成L107核心电路板的连接关系图)
阿维塔11激光雷达控制器总成L107连接原理图:
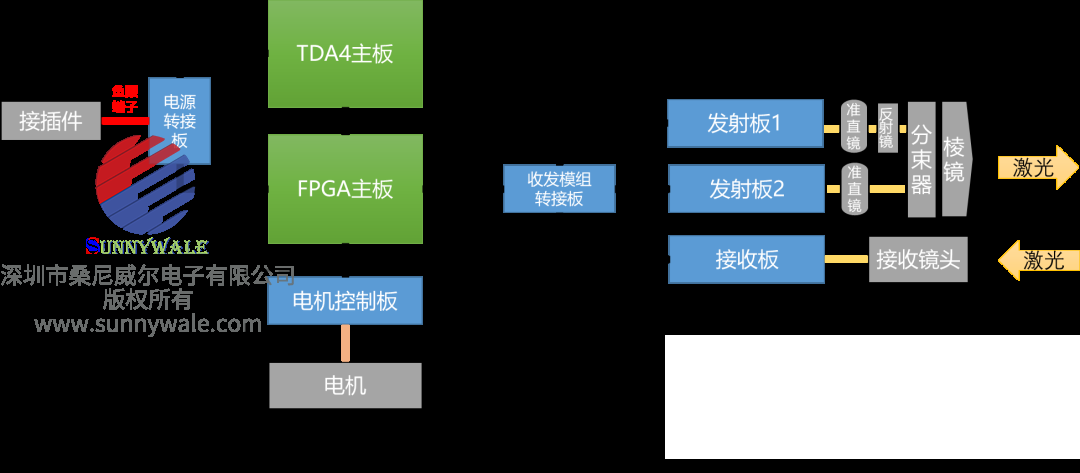
图12(阿维塔11激光雷达L107连接原理图)
阿维塔激光雷达L107整体设计非常紧凑,大量使用软排线进行板间连接,电路板设计也非常规整。
【2】电机模组(扫描模块)
该激光雷达采用转镜进行水平方向上的扫描,有4面反射镜。
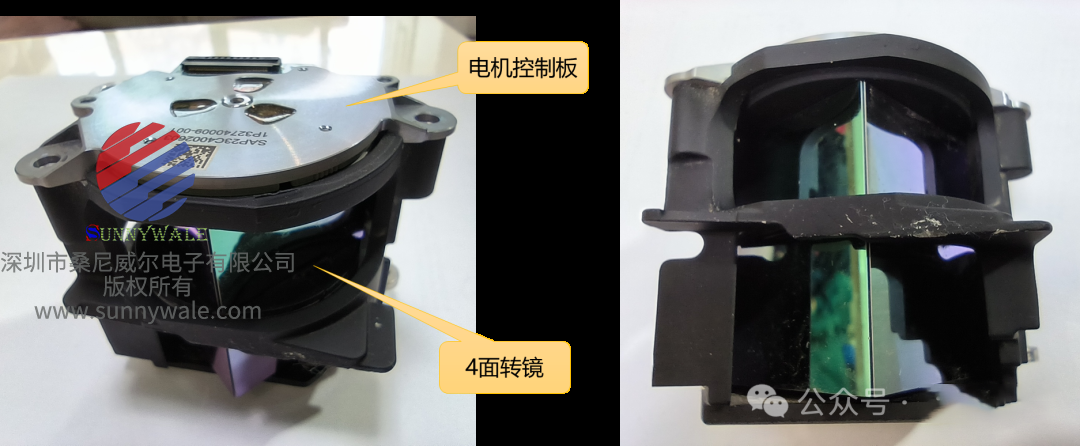
图13(激光雷达L107电机模组=扫描模块)
电机模组的4个视图如下:
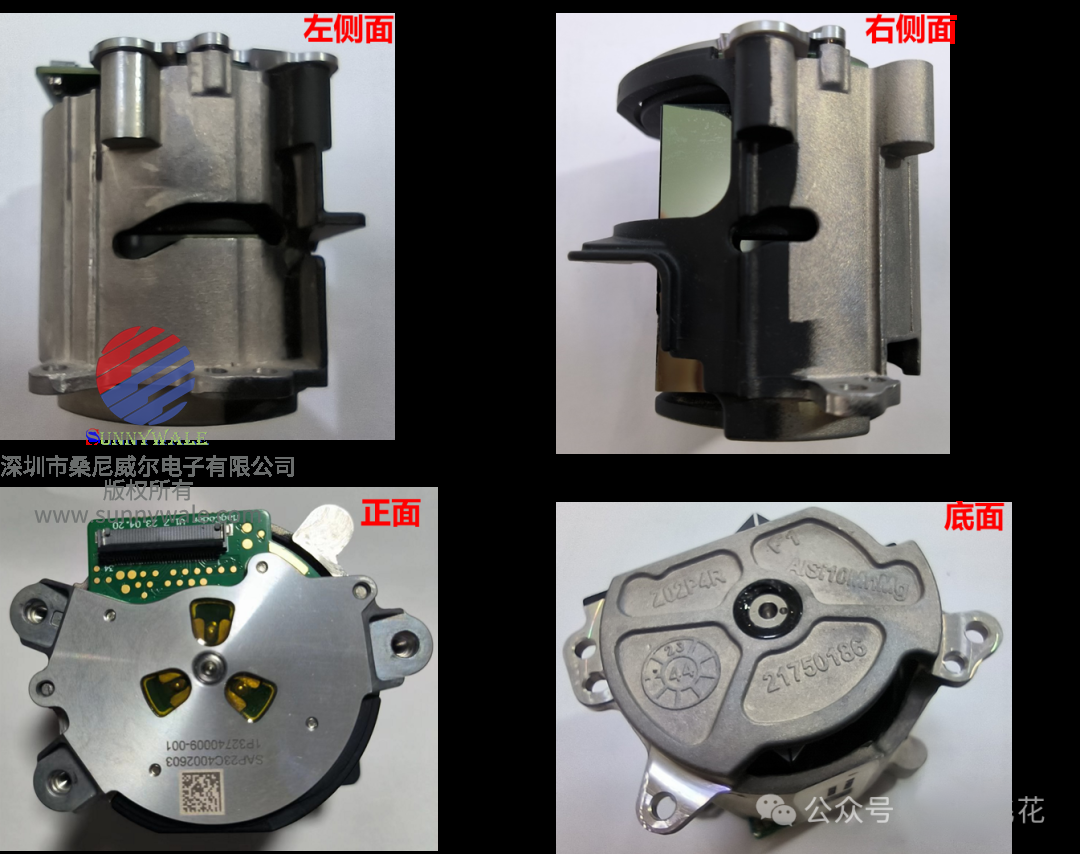
图14(激光雷达L107电机模组的4个视图)
在靠近激光出入口的位置,合金架涂上了黑色吸波材料,用于吸收多余的激光束杂散和反射,减小干扰。
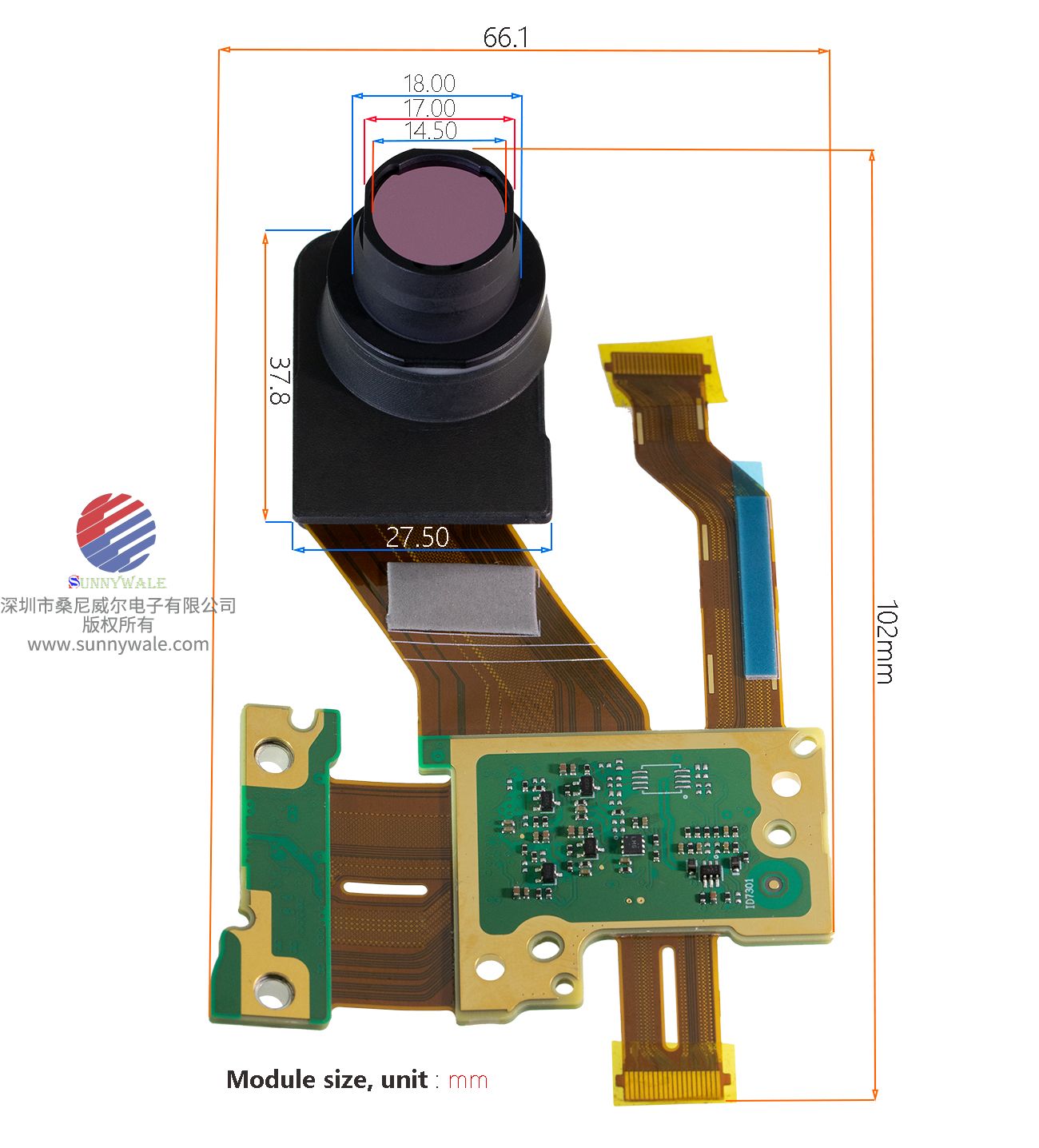
【3】收发模组
收发模组是该雷达最复杂的一个结构,原理如下:

图15(阿维塔激光雷达L107收发模组原理图)
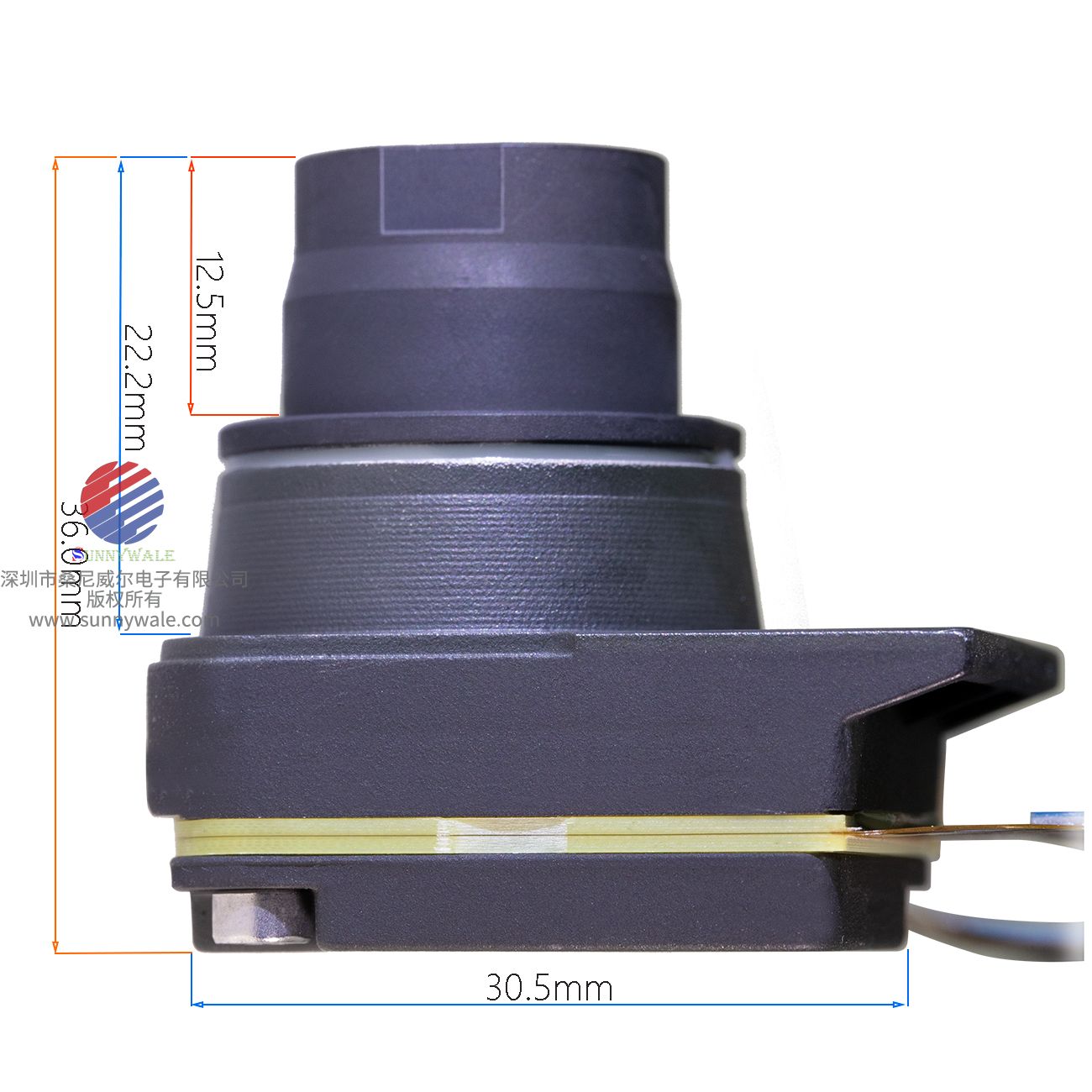
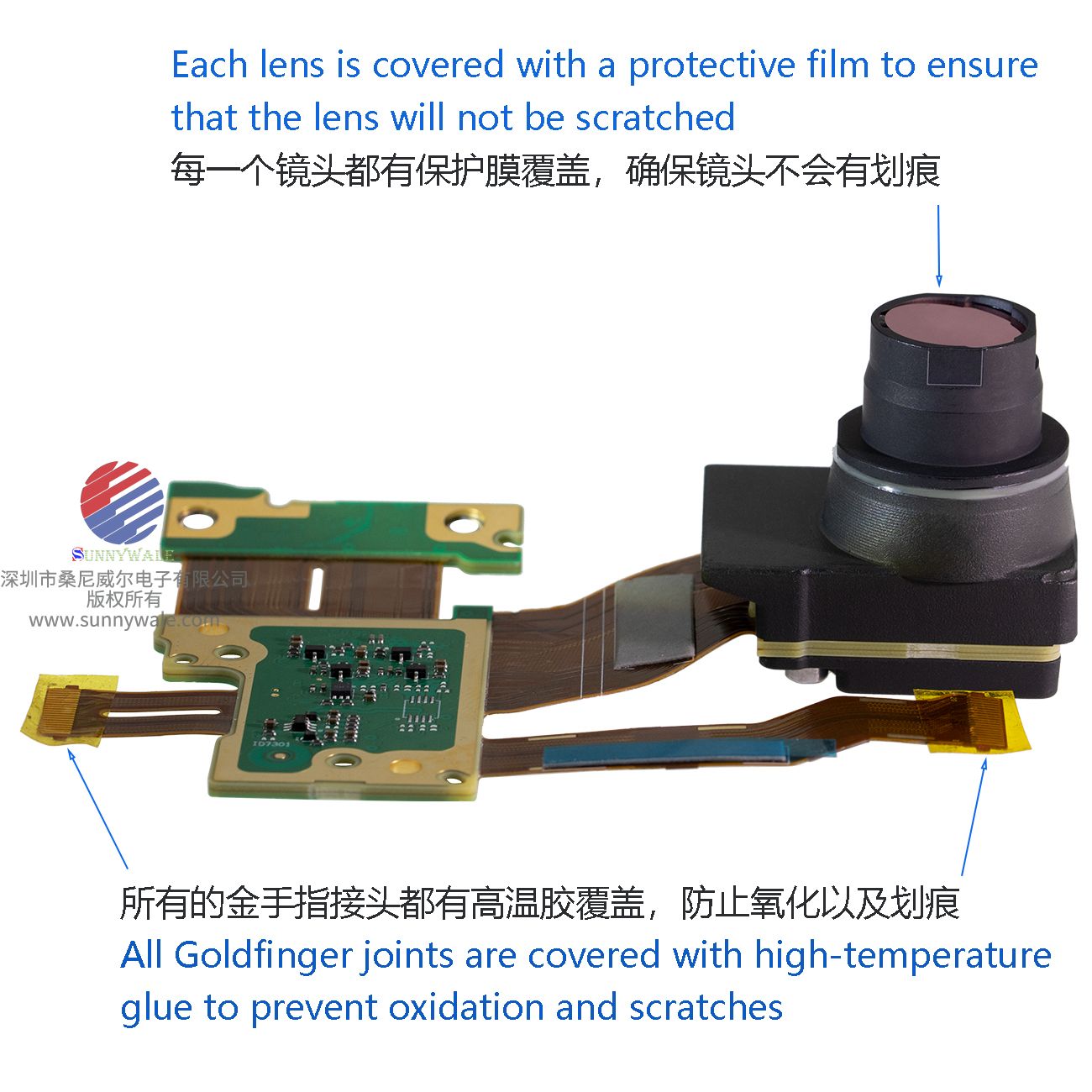
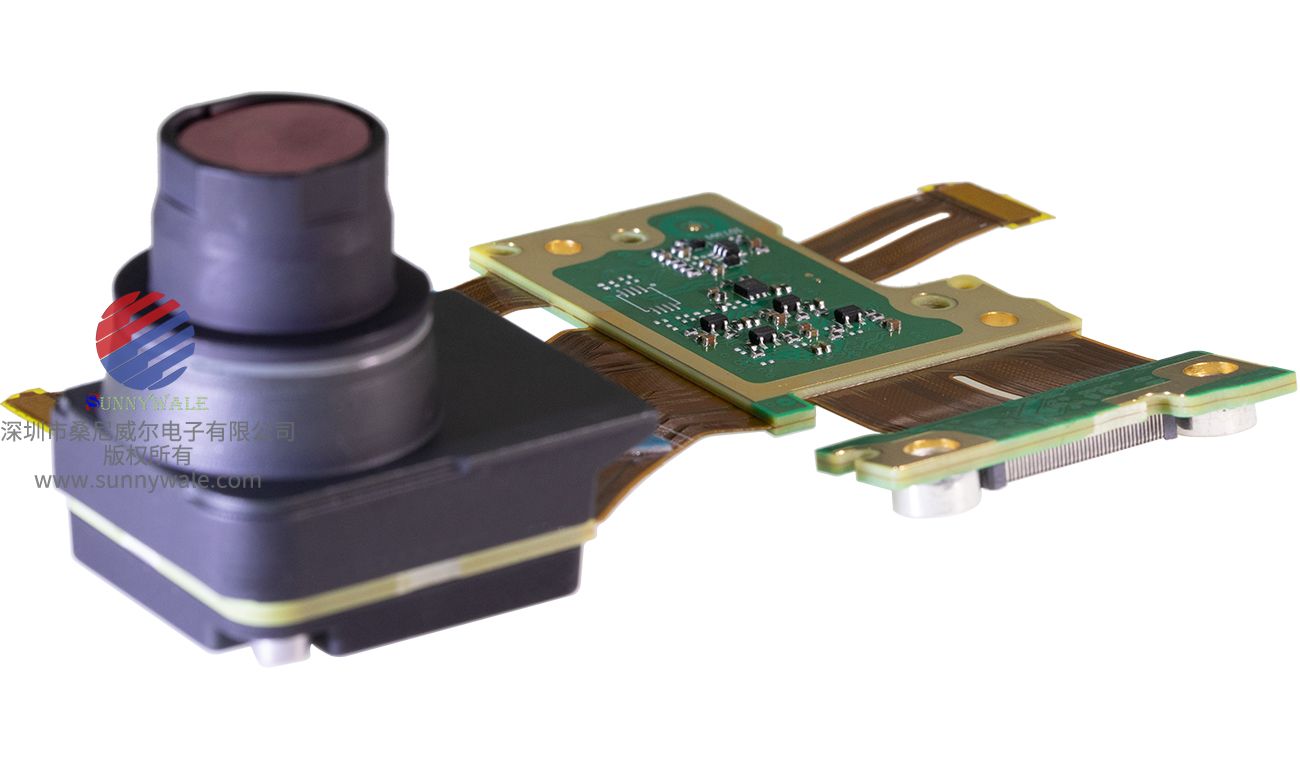
为了尽可能的表达清楚,从4个45°角度拍摄了4张照片,标记如下4图:使用了索尼产的
IMX459
图16(阿维塔11激光雷达L107模组4个角度图)
发射光路
发射光路方案:
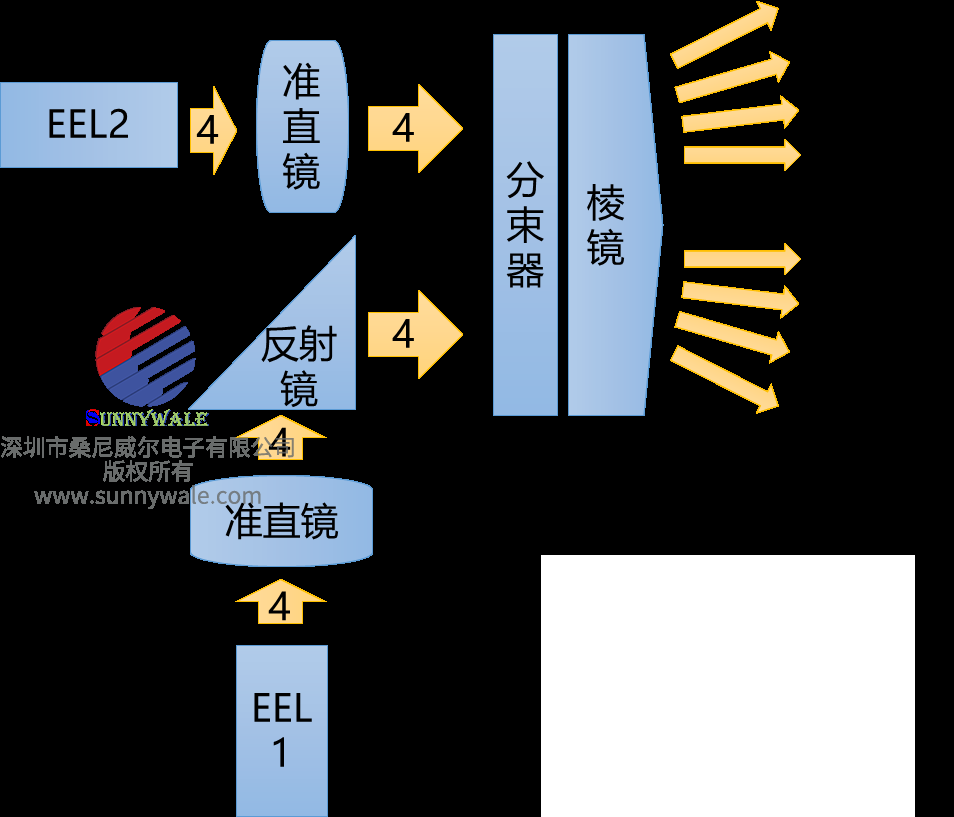
图17(阿维塔11激光雷达L107发射光路方案图)
两个发射板电路完全相同,上面主要是驱动EEL激光发射器:
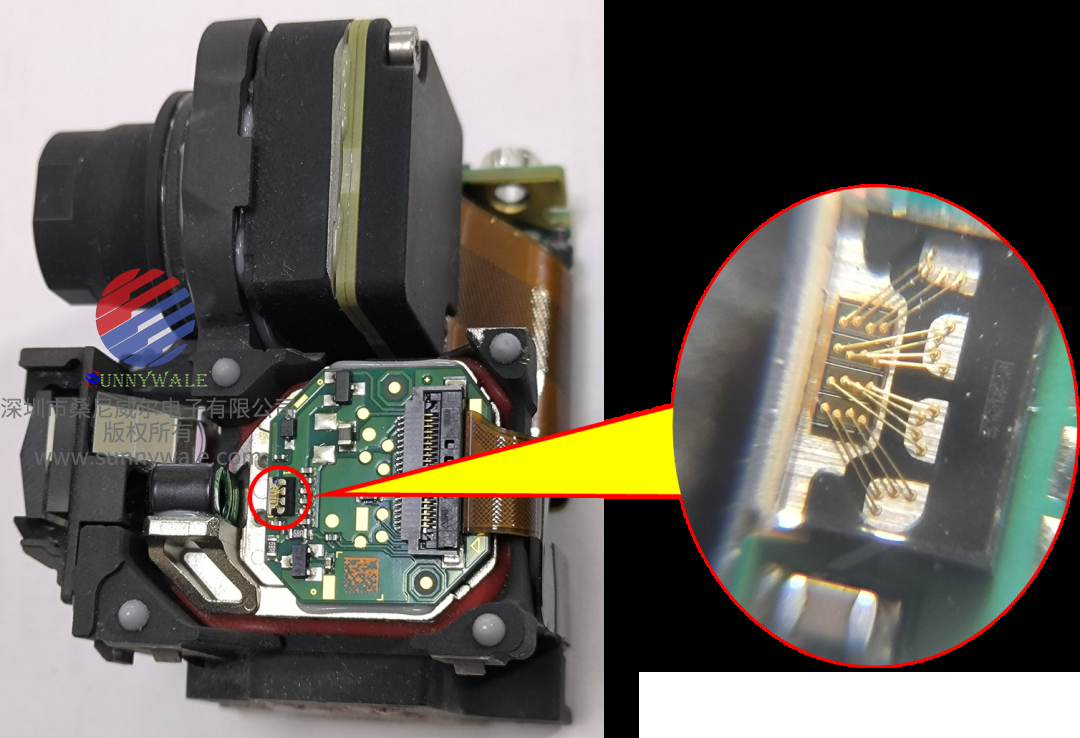
图18(阿维塔11激光雷达L107有四个EEL激光发射器)
该雷达每块发射板上有4个EEL,两块发射板一共8个EEL。
EEL后面是准直镜:
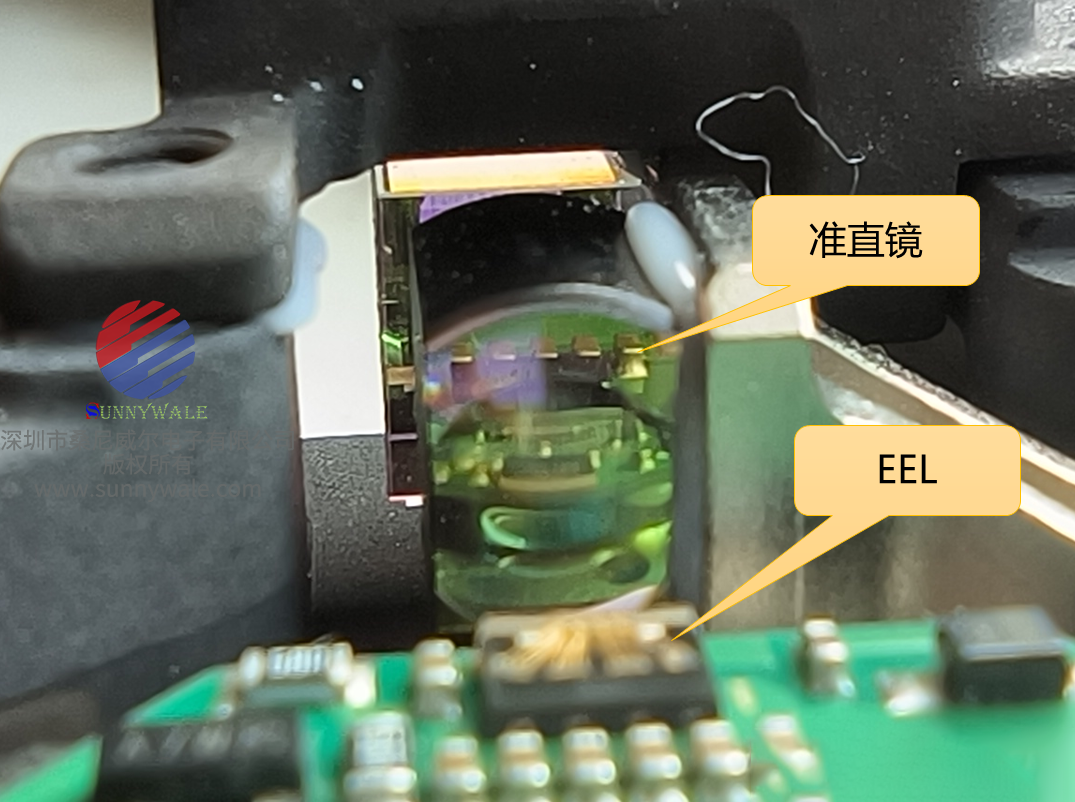
图19(EEL后面的准直镜)
通过准直镜后,发射板1的激光由一个反射镜反射后到达分束器,发射板2的激光直接到达分束器。
一共8个EEL光束,由分束器分为96个激光束,然后由棱镜最终调整角度后射出。
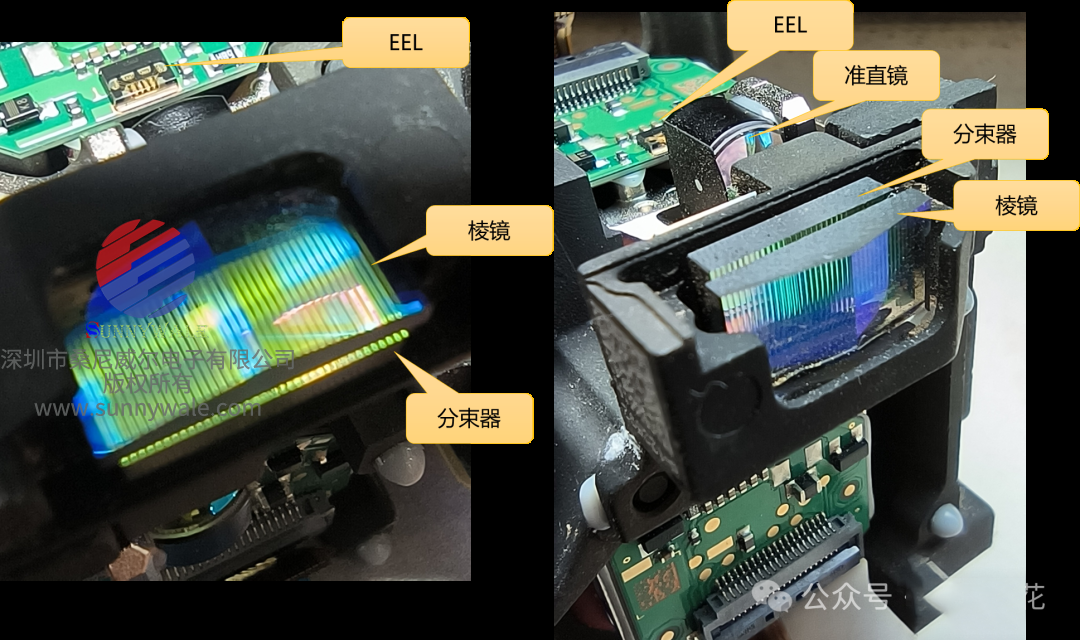
图20(8个EEL光束,准直镜,分束器,棱镜图)
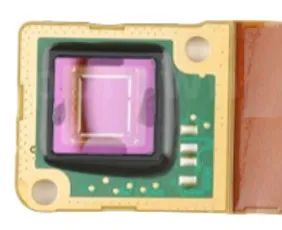
接收光路
接收器主要包括接收镜头、滤光片和SPAD等,由于接收板是用胶粘在支架上,本次拆解并没有打开。下图是拆解图片,显示是一颗来自索尼的SPAD激光雷达传感器IMX459
【4】主板
阿维塔11激光雷达一共有2块主板,由于上面分别有TDA4和FPGA,因此暂时分别命名为TDA4主板和FPGA主板。
TDA4主板
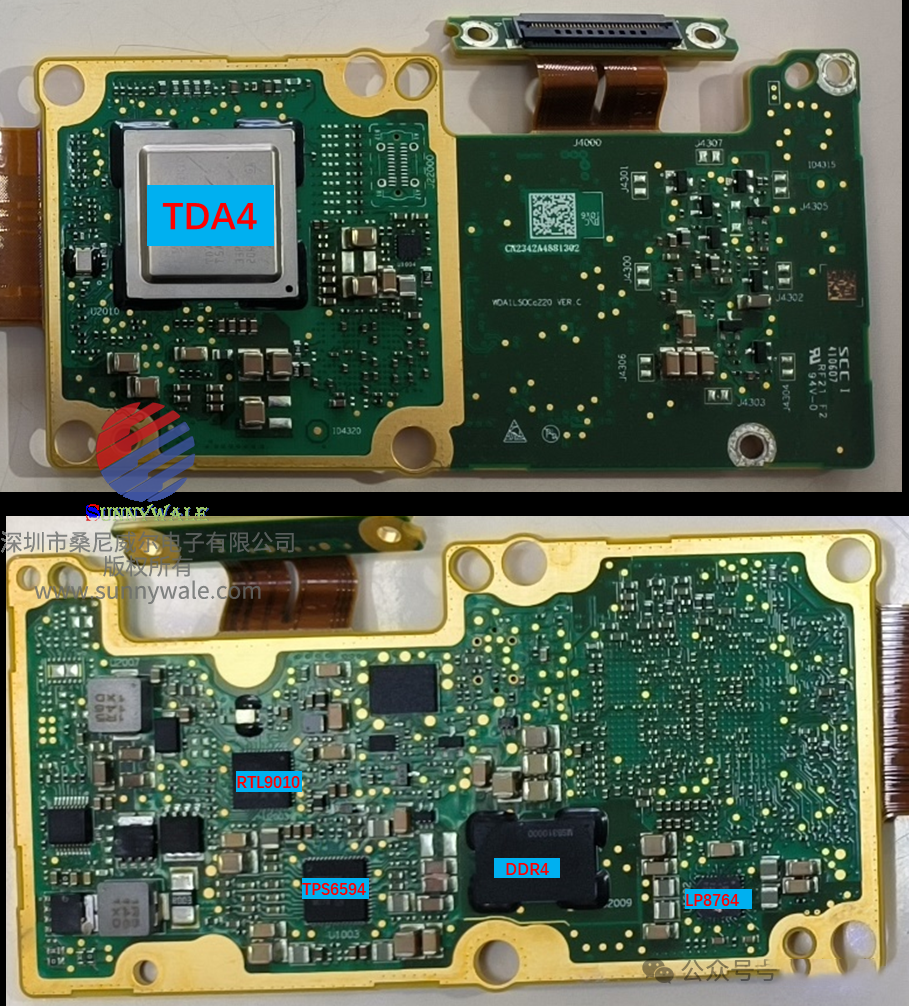
图22(TDA4主板和FPGA主板)
● TPS6594-Q1:TI的具有五个降压稳压器和四个低压降稳压器的汽车类 2.8V 至 5.5V PMIC;
● LP8764-Q1:4 5-A/20-A multiphase buck converters PMIC for automotive SoCs;
● RTL9010:REALTEK的具备MACsec加解密功能的,车用高能效以太网PHY芯片;
TDA4AL Jacinto(TM)处理器:

图23(TDA4AL Jacinto(TM) 处理器)
TDA4AL Jacinto(TM) 处理器主要性能:
● 两个C7x浮点、矢量DSP,性能高达1.0GHz、160GFLOPS、512GOPS;
● 深度学习矩阵乘法加速器(MMA),性能高达8TOPS(8b)(频率为1.0GHz);
● 具有图像信号处理器(ISP)和多个视觉辅助加速器的视觉处理加速器(VPAC);
● 深度和运动处理加速器(DMPAC),双核64位Arm?Cortex?-A72微处理器子系统,性能高达2GHz–每个双核Cortex?-A72集群具有1MBL2共享缓存–每个Cortex?-A72内核具有32KBL1数据缓存和48KBL1指令缓存;
● 六个Arm?Cortex?-R5FMCU,1.0GHz–16K指令缓存,16K数据缓存,64KL2TCM–隔离MCU子系统中,有两个Arm?Cortex?-R5FMCU–通用计算分区中,有四个(TDA4VE)或两个(TDA4AL/TDA4VL)Arm?Cortex?-R5FMCU;
● GPU IMGBXS-4-64,256kB缓存,高达800MHz,50GFLOPS,4GTexels/s(TDA4VE和TDA4VL);
FPGA主板

图24(阿维塔11激光雷达L107 FPGA主板)
采用一片来自于LATTICE的低功耗FPGA:

图25(阿维塔11激光雷达L107 LATTICE的低功耗FPGA:LIFCL-40 7BG256A B3092T02)
【5】阿维塔11激光雷达L107其他部件
在镜面背部有4个接触点,在组装之后分别和电路板的4个弹簧触点接触,推测应该是加热丝的接口,用于加热视窗面,防止积雪。
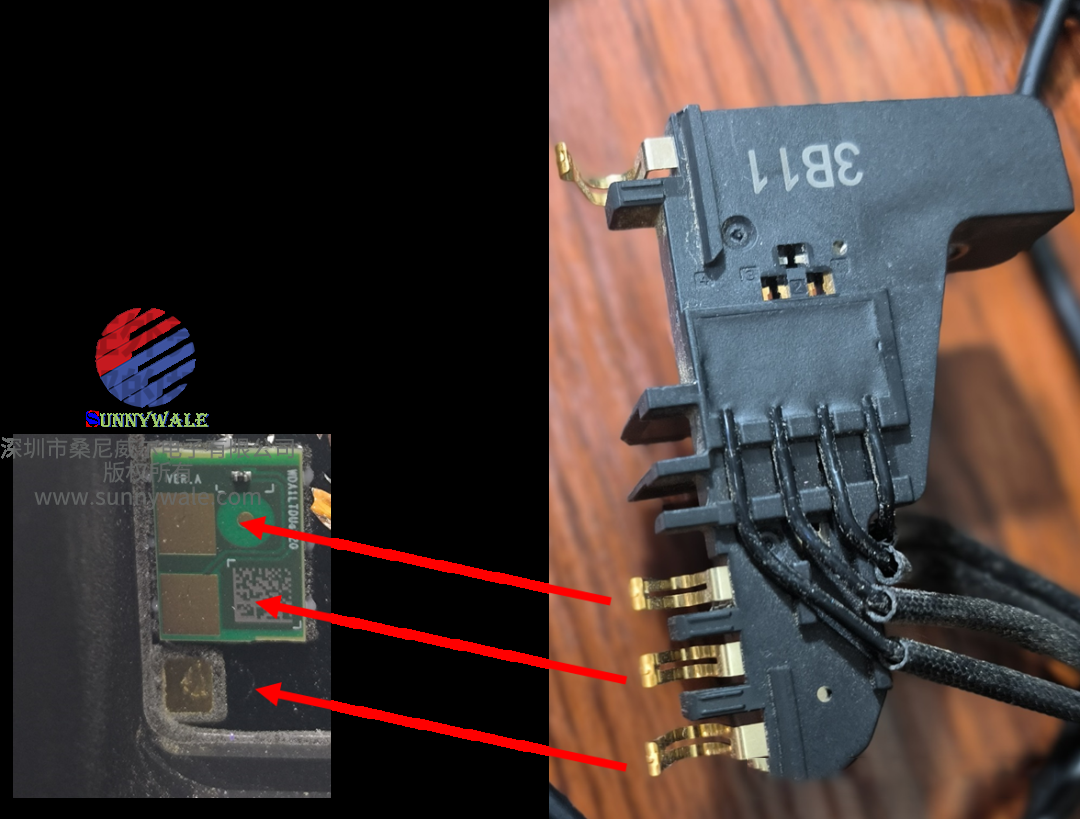
图26(4个视窗加热防冻接触点)
【四】华为96线激光雷达技术分析
对于华为96线激光雷达,分析如下:
【1】华为96线激光雷达采用了905nm波长激光。905nm技术占据89%的市场份额,1550nm激光测距范围更远,但是成本较高。速腾M3和禾赛AT512分别采用了940nm和905nm技术,测距能力超过了现有的1550nm产品。
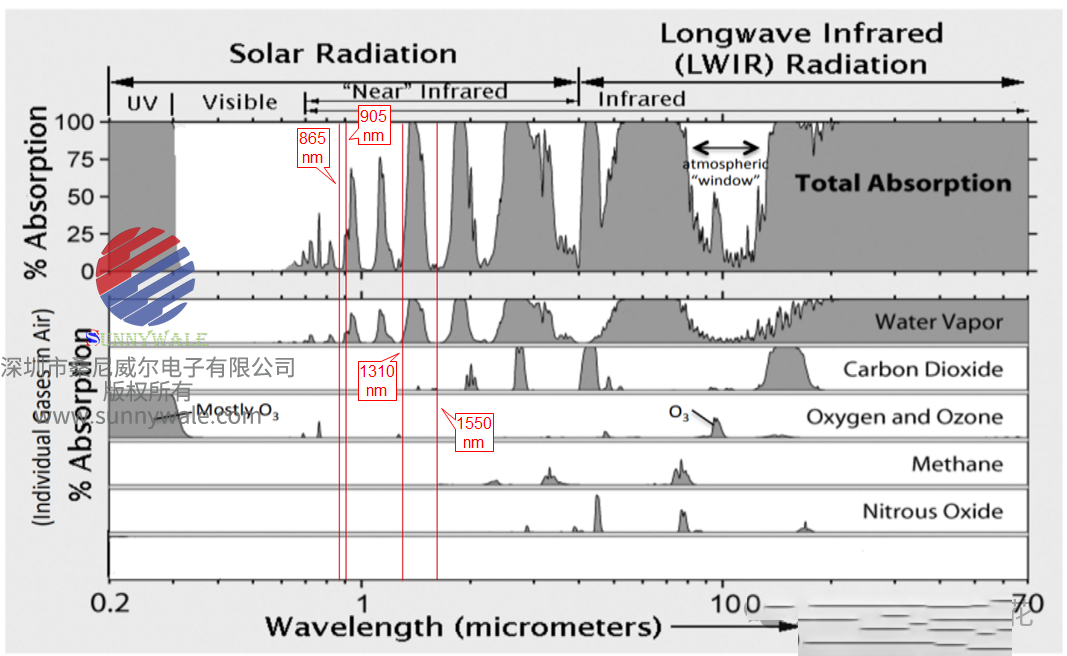
图27(阿维塔11激光雷达L107905nm波长激光图)
图片来源:San Francisco State University《Absorption Spectra_Atmosphere》
图达通公司之前主要使用1550nm技术,目前也推出905nm方案的Robin E产品。
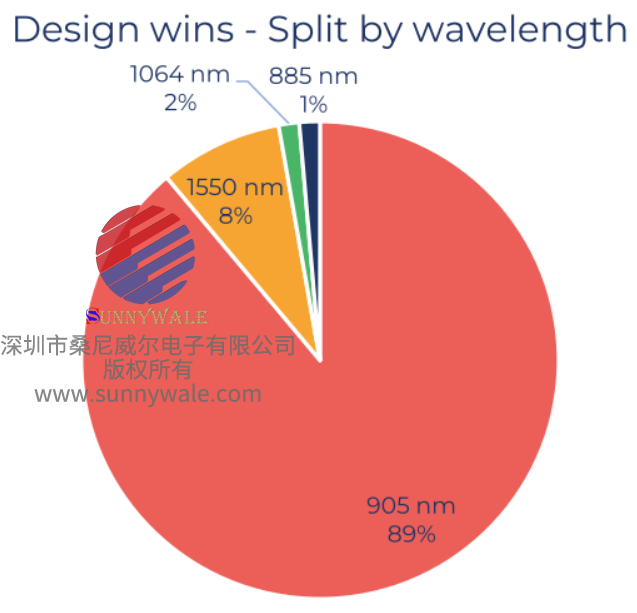
图28(905纳米激光雷达市场份额图)
图片来源:YOLO《Automotive LIDAR Market: Competitive Dynamics, Technology Evolution, and Revenue Trends》(Automotive LiDAR conference 2023, October 3-5 )
【2】华为96线激光雷达采用转镜+电子扫描方式,这种方式是目前半固态激光雷达较为主流的扫描方式。
转镜是目前应用最广的路线,包括禾赛、华为、图达通、镭神智能等大多数厂商都有采用转镜路线的产品。转镜路线的核心要素是电机控制,以及针对特定波长高反射率的镀膜反射镜。
转镜一般搭配振镜或者线光源实现激光扫描,其中,转镜用于水平扫描,振镜或者线光源用于垂直扫描。因此,“转镜+振镜”也被常被称为2维扫描,“转镜+线光源”被称为1维扫描或者1维扫描+电子扫描。
“转镜+线光源”的优势在于发射的是连续的线光斑,因此垂直方向的分辨率非常高。禾赛AT128的转镜+电子扫描:

图29(禾赛AT128的转镜+电子扫描)
图达通公司falcon激光雷达采用“转镜+振镜”方案,该方案灵活度较高,通过改变转镜和振镜的转速,能够设计灵活的ROI。
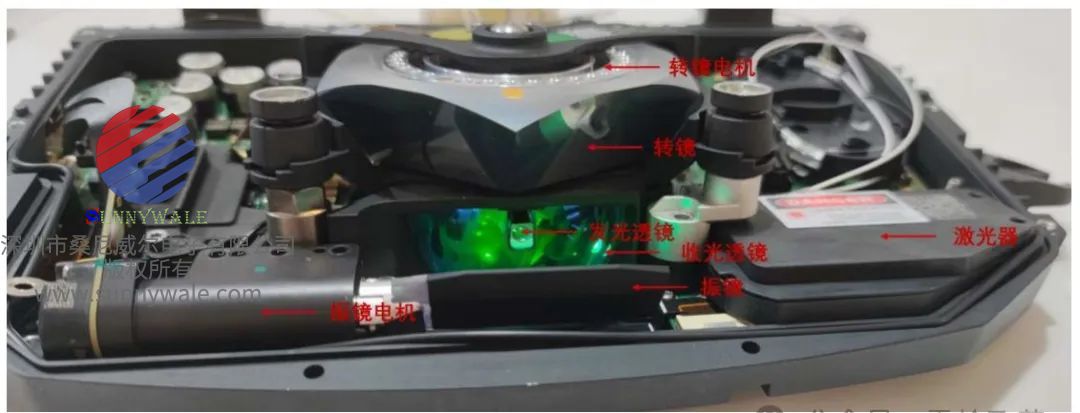
图30(图达通公司falcon激光雷达采用“转镜+振镜”方案)
MEMS振镜是另一种扫描路线,主要是速腾聚创在使用,体积较小。由于MEMS微振镜口径较大,但在极端振动条件下使用时,良率较低,MEMS方案可能会被逐渐放弃,速腾聚创在下一代的M3产品中也由MEMS改为了转镜+电子扫描方式。
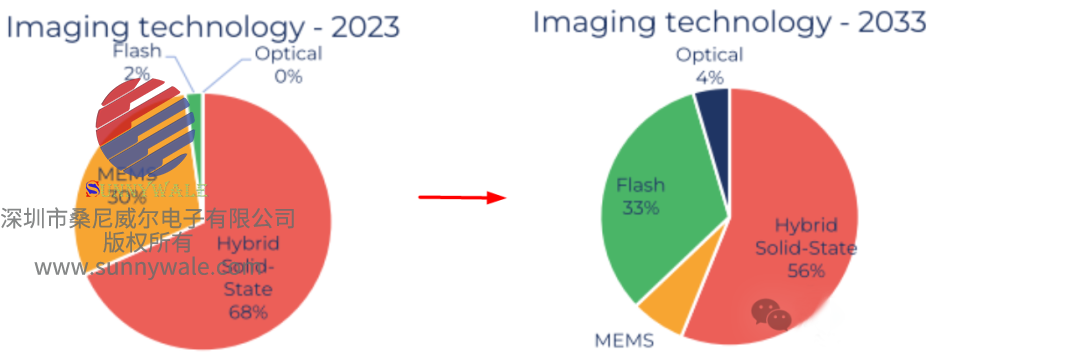
图31(MEMS振镜扫描路线将在未来十年逐渐减少市场份额)
图片来源:YOLO《Automotive LIDAR Market: Competitive Dynamics, Technology Evolution, and Revenue Trends》(Automotive LiDAR conference 2023, October 3-5 )
速腾M1P的MEMS扫描:

图32(速腾M1P的MEMS扫描方式)
【3】华为96线激光雷达发射光路和接收光路是非同轴的,使用各自的透镜,即旁轴光路,该光路优点是成像清晰程度较高,缺点是近场盲区较大。
目前速腾、禾赛等产品基本都是采用同轴光路。同轴光路是收发共用一组透镜,检测更为直接,易于对光路进行校准,近场盲区小。缺点是成本稍高,内部结构稍复杂,而且成像清晰程度比独立的旁轴成像要稍差。
禾赛的AT128的同轴光路:
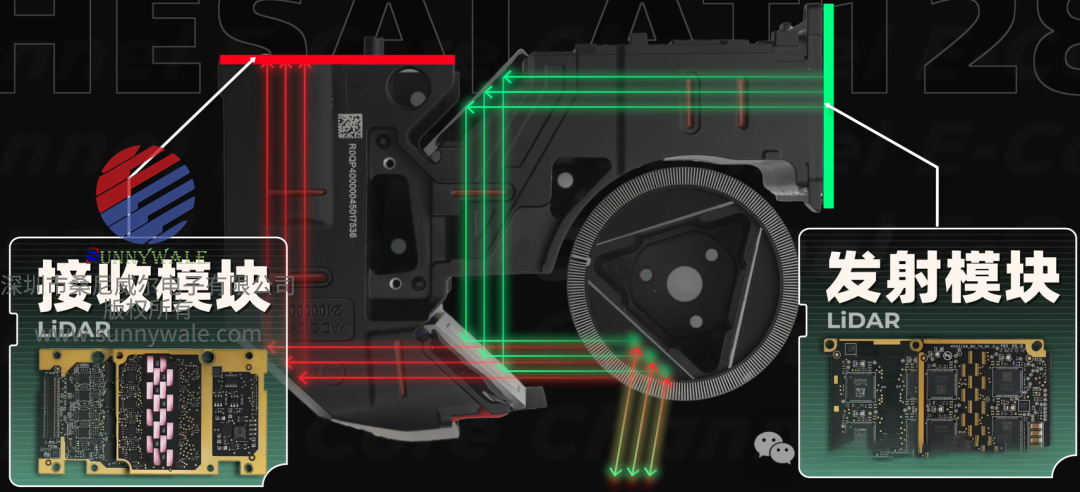
图33(禾赛的AT128的同轴光路)
【4】华为96线激光雷达采用EEL激光器。近些年,多家激光器公司开发多层VCSEL激光器,将发光功率密度提升了5-10倍,凭借在成本及性能方面的优势,从目前趋势来看,VCSEL正逐步取代EEL。华为的下一代192线激光雷达,也采用了VCSEL激光器。
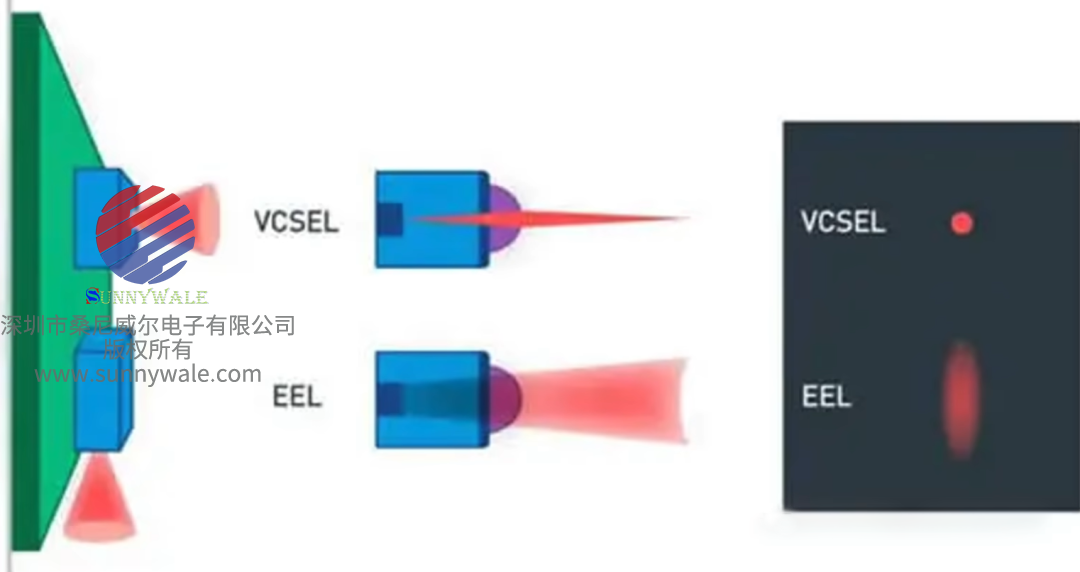
图34(VCSEL正逐步取代EEL)
EEL和VCSEL的指标对比:
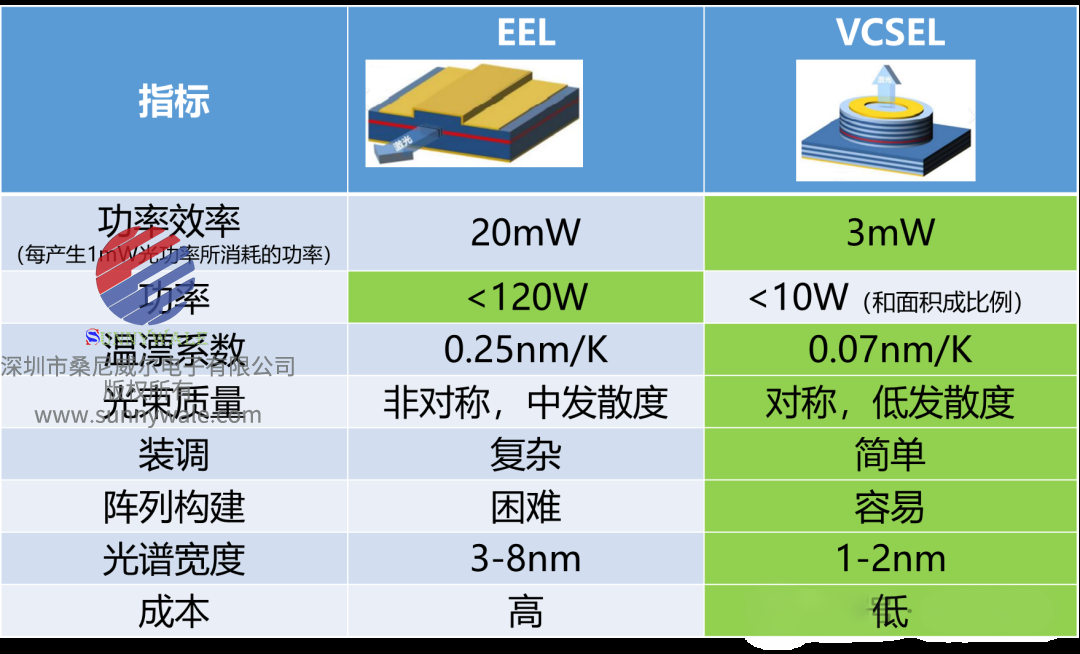
图35(EEL和VCSEL的指标对比图)
【5】华为96线激光雷达采用SPAD作为接收器。在905nm路线下,SPAD/ SiPM替代 APD 已成大势。SPAD/SiPM面临的一个比较明显的挑战是自然光干扰,尤其是强烈日光的干扰。强烈的阳光入射会导致 SPAD单元饱和,并且在恢复初始状态前都无法吸收光子,因而有可能漏掉真正的反射信号。
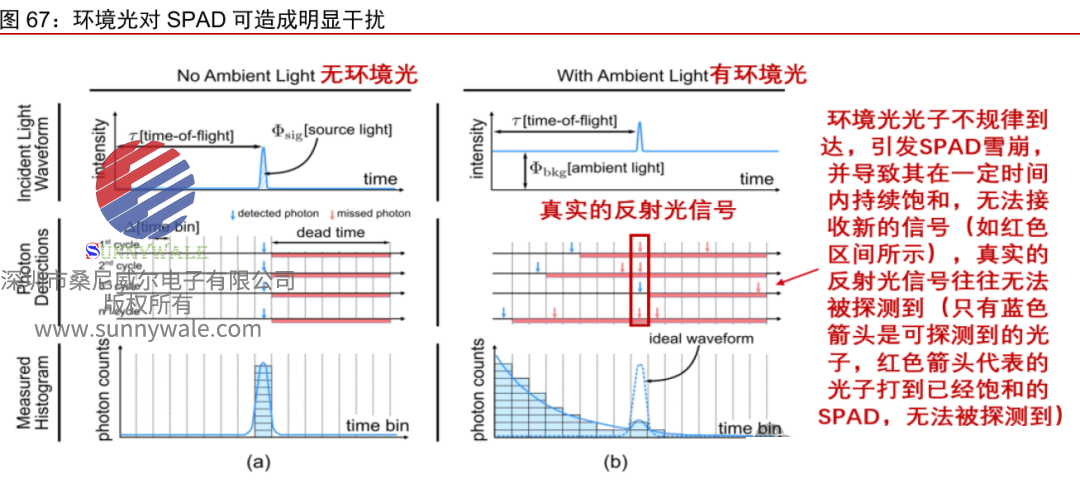
图36(环境光对SPAD可造成明显干扰)
资料来源:Anant Gupta et al.《Photon-Flooded Single-Photon 3D Cameras》
所以在强烈的日光下,使用 SPAD/SiPM 的激光雷达经常会出现探测距离明显下降的问题。虽然目前已有一些算法进行日光干扰的处理,但往往效果并不完美,有时还会引入额外噪声,所以 SPAD 对自然光的处理还有一些挑战。
【6】华为96线激光雷达处理器采用了TDA4和FPGA,分立程度较高。目前激光雷达的一个发展方向是采用集成度越来越高的SoC,将SPAD、TIA、ADC 等都集成到 SoC 中,进一步降低成本,提升性能。具行业消息,禾赛AT512和一径科技的EZ6已经采用了集成度相当高的SoC处理器。

图37(禾赛AT512和一径科技的EZ6采用了集成度相当高的SoC处理器)
【五】总结
华为96线激光雷达发布于2020年,虽然从指标上看,比现在的主流产品稍显落后,不过在相当多的技术方案上,和目前主流的激光雷达发展方向契合。
2023年12月26日,华为发布192线激光雷达。

图38(华为发布192线激光雷达)
华为192线激光雷达采用VCSEL+SPAD收发链路,以及转镜+电子扫描架构。具体参数:
● 测距:250米(最远),180米(10%反射率)
● 点云密度:184万点/秒
● 水平角分辨率:0.25°(@20Hz扫描),0.125°(@10Hz扫描)
● 垂直分辨率:0.1°
● 扫描频率:最高20Hz

图39(华为192线激光雷达采用VCSEL+SPAD收发链路,以及转镜+电子扫描架构)
参考资料:
中信证券,激光雷达产业深度研究:从拆解五款激光雷达看智能驾驶投资机遇,https://zhuanlan.zhihu.com/p/568700438
传感器专家网,暴涨450%,超71万台!中国激光雷达遥遥领先!网友:被制裁不冤,https://mp.weixin.qq.com/s/mgXlzelZd5OBIIS9XhmUtg
Yvon Shong,聚焦激光雷达(四)——光学系统,https://zhuanlan.zhihu.com/p/622652543
速腾聚创官网:https://www.robosense.cn/product
禾赛科技官网:https://www.hesaitech.com/cn/
图达通官网:https://www.seyond.cn/